Давайте познакомимся поближе с сервоприводом и научимся поворачивать его на нужный угол.
Давайте познакомимся поближе с сервоприводом и научимся поворачивать его на нужный угол.
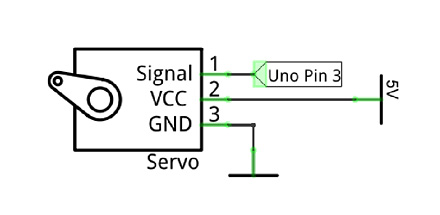
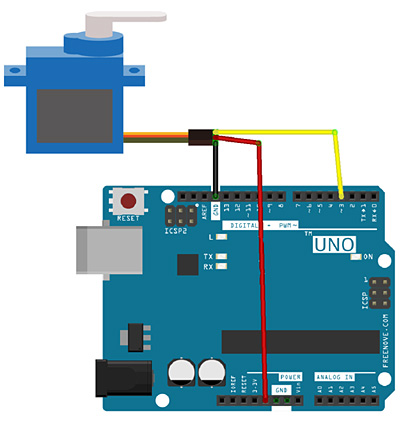
Используем вывод D3 платы Arduino Uno для управления сервоприводом. Подключение: красный провод (5 В), коричневый (GND), оранжевый — сигнальный.
Напишем скетч для управления сервоприводом.
#include <Servo.h>
Servo myservo;
int pos = 0;
int servoPin = 3;
void setup() {
myservo.attach(servoPin);
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) {
myservo.write(pos);
delay(15);
}
for (pos = 180; pos >= 0; pos -= 1) {
myservo.write(pos);
delay(15);
}
}
Для сервопривода мы используем библиотеку Servo:
#include <Servo.h>
Создаём объект myservo:
Servo myservo;
После того как объект класса Servo объявлен, его можно инициализировать.
myservo.attach(servoPin);
После инициализации мы можем управлять сервоприводом и поворачивать его на нужный нам угол:
myservo.write(pos);
В функции loop() мы используем оператор цикла для вращения сервопривода от 0 до 180 градусов, а потом обратно.
Скомпилируйте и загрузите скетч на плату, чтобы посмотреть результат.