На этом уроке мы используем для управления двигателем микросхему-драйвер L293D.
На этом уроке мы используем для управления двигателем микросхему-драйвер L293D.
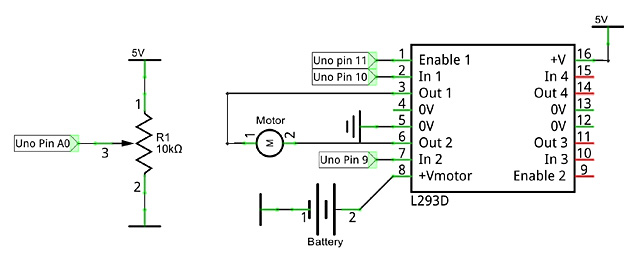
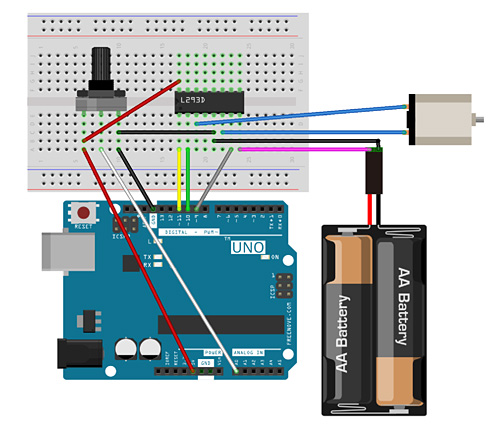
Будем использовать выводы платы Uno следующим образом: вывод A0 для считывания положения потенциометра; D9 и D10 для контроля направления вращения двигателя; D11 для генерации ШИМ сигнала, который будет изменять скорость вращения двигателя.
Теперь напишем код для управления частотой вращения и направлением вращения двигателя с помощью роторного потенциометра. Когда потенциометр находится в среднем положении, скорость двигателя будет минимальной, а при изменении его положения, скорость будет увеличиваться. Кроме того, если потенциометр отклоняется от среднего положения по часовой стрелке или против часовой стрелки, направление вращения двигателя будет изменяться.
int in1Pin = 10;
int in2Pin = 9;
int enable1Pin = 11;
boolean rotationDir;
int rotationSpeed;
void setup() {
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(enable1Pin, OUTPUT);
}
void loop() {
int potenVal = analogRead(A0);
rotationSpeed = potenVal - 512;
if (potenVal > 512) {
rotationDir = true;
} else {
rotationDir = false;
}
rotationSpeed = abs(potenVal - 512);
driveMotor(rotationDir,map(rotationSpeed, 0, 512, 0, 255));
}
void driveMotor(boolean dir, int spd) {
// Control motor rotation direction
if (rotationDir) {
digitalWrite(in1Pin, HIGH);
digitalWrite(in2Pin, LOW);
}
else {
digitalWrite(in1Pin, LOW);
digitalWrite(in2Pin, HIGH);
}
// Control motor rotation speed
analogWrite(enable1Pin, constrain(spd, 0, 255));
}
Функция driveMotor() контролирует направление вращения двигателя и его скорость.
void driveMotor(boolean dir, int spd) {
// Control motor rotation direction
if (rotationDir) {
digitalWrite(in1Pin, HIGH);
digitalWrite(in2Pin, LOW);
}
else {
digitalWrite(in1Pin, LOW);
digitalWrite(in2Pin, HIGH);
}
// Control motor rotation speed
analogWrite(enable1Pin, constrain(spd, 0, 255));
}
В функции loop() мы отслеживаем положение роторного потенциометра и меняем скорость вращения двигателя в зависимости от его положения.
void loop() {
int potenVal = analogRead(A0);
rotationSpeed = potenVal - 512;
if (potenVal > 512) {
rotationDir = true;
} else {
rotationDir = false;
}
rotationSpeed = abs(potenVal - 512);
driveMotor(rotationDir, map(rotationSpeed, 0, 512, 0, 255));
}
Функция abs() вычисляет абсолютное значение числа.
Скомпилируйте и загрузите скетч на плату. Далее, меняя положение потенциометра, вы сможете регулировать скорость вращения двигателя.