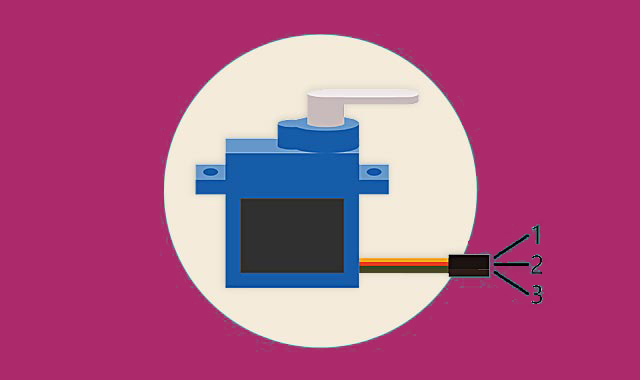
Сервопривод — это система, состоящая из двигателя постоянного тока, редуктора, датчика поворота и микросхемы управления. Как правило, сервопривод может вращаться на 180 градусов. Но бывают сервоприводы способные вращаться на большие углы, например 270 или 360 градусов.